An intersection between two geometries is defined as the geometry that is
contained in both geometries. In other words all points laying on the
intersection is also part of the two incoming geometries. It follows that the
result of calculating intersections can be varied, even between the same
combination of geometries. For example, The intersection between a triangle
and a plane can be NULL, a point, a segment, or a triangle depending on
their relative position and orientation. Because of this, and to avoid
confusion around the return type intersection() always return a list of
scalar geometries or NULLs. Intersections can only be calculated between
geometries located in space, which rules out vectors and directions. Further,
not all combinations of geometries have exact intersections defined (circles
and spheres are especially limited). euclid also provides a list of type-safe
intersection functions that allways returns a vector of geometries of the
requested type. Intersections that doesn't match the requested type are
returned as NA, as are non-intersecting pairs. It is thus not possible to
determine if an intersection occurs using these functions.
Usage
intersection(x, y, ...)
intersection_circle(x, y)
intersection_iso_rect(x, y)
intersection_plane(x, y)
intersection_point(x, y)
intersection_line(x, y)
intersection_ray(x, y)
intersection_segment(x, y)
intersection_sphere(x, y)
intersection_triangle(x, y)Value
a list of scalar geometry vectors and NULLs depending on the result
of the intersection query, or a vector of geometries as requested.
See also
Other Intersections:
has_intersection()
Other Boolean operations:
boolean_operations
Examples
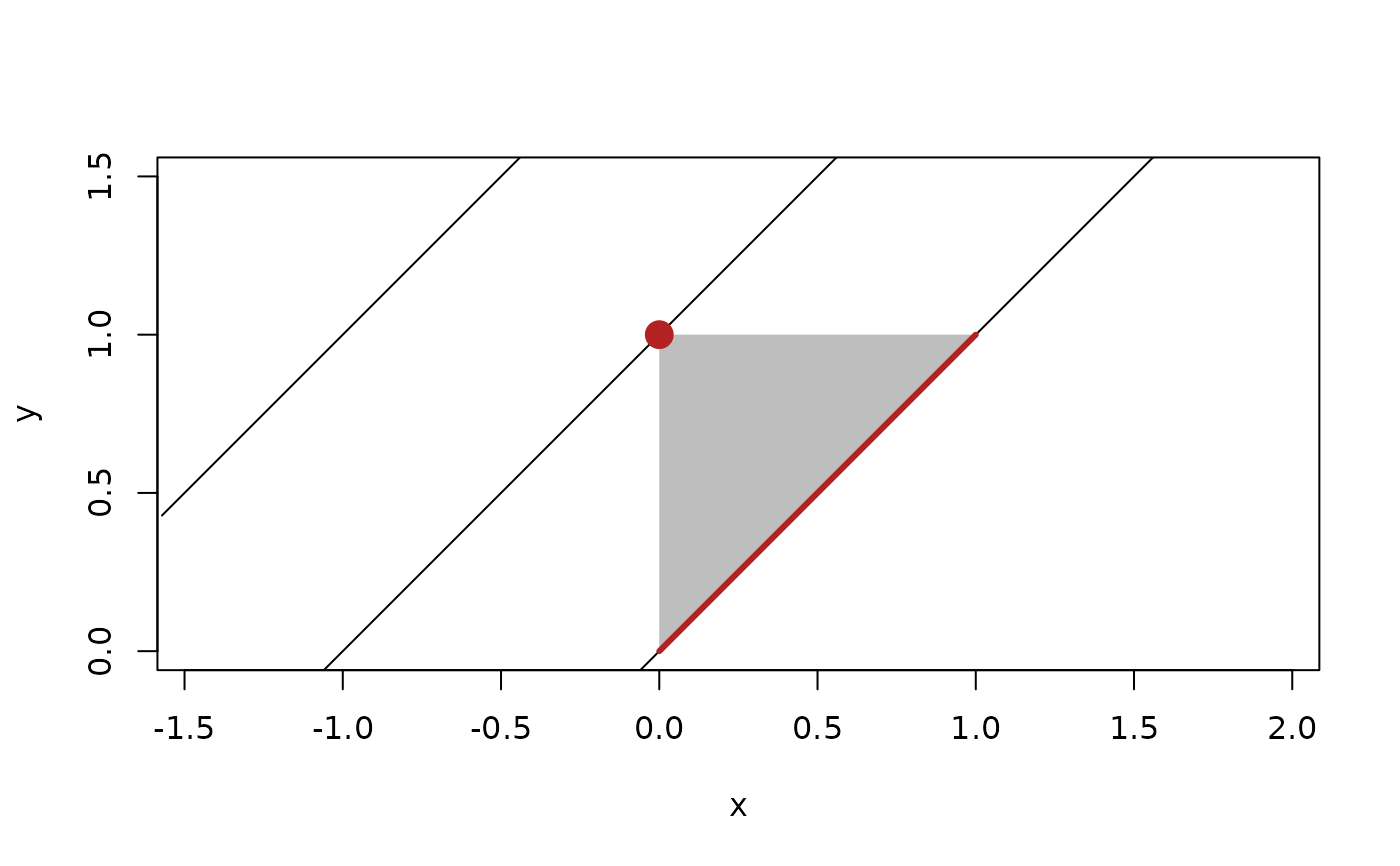
# Example of the difference in output
t <- triangle(point(0, 0), point(1, 1), point(0, 1))
l <- line(1, -1, c(0, 1, 2))
i <- intersection(t, l)
i
#> [[1]]
#> <2D segments [1]>
#> [1] [<x:1, y:1>, <x:0, y:0>]
#>
#> [[2]]
#> <2D points [1]>
#> [1] <x:0, y:1>
#>
#> [[3]]
#> NULL
#>
plot(t, col = "grey", border = NA, xlim= c(-0.5, 1), ylim = c(0, 1.5))
euclid_plot(l)
for (int in i) {
euclid_plot(int, col = "firebrick", pch = 16, cex = 2, lwd = 3)
}
 # Input is symmetric
intersection(l, t)
#> [[1]]
#> <2D segments [1]>
#> [1] [<x:1, y:1>, <x:0, y:0>]
#>
#> [[2]]
#> <2D points [1]>
#> [1] <x:0, y:1>
#>
#> [[3]]
#> NULL
#>
# Request only segment intersections
intersection_segment(l, t)
#> <2D segments [3]>
#> [1] [<x:1, y:1>, <x:0, y:0>] <NA> <NA>
# Input is symmetric
intersection(l, t)
#> [[1]]
#> <2D segments [1]>
#> [1] [<x:1, y:1>, <x:0, y:0>]
#>
#> [[2]]
#> <2D points [1]>
#> [1] <x:0, y:1>
#>
#> [[3]]
#> NULL
#>
# Request only segment intersections
intersection_segment(l, t)
#> <2D segments [3]>
#> [1] [<x:1, y:1>, <x:0, y:0>] <NA> <NA>